Система автоматической фотовидеофиксации «ЛОБАЧЕВСКИЙ»
- 11.11.2020
- Рубрика:
- Метки: Россия
Системы измерительные с автоматической фотовидеофиксацией многоцелевые «ЛОБАЧЕВСКИЙ» предназначены для измерения скорости движения транспортных средств (далее — ТС) радиолокационным методом, по видеокадрам в зоне контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС, определения текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU), определения координат местоположения Систем в плане, а также (в зависимости от комплектации) могут быть предназначены для измерений нагрузки на ось транспортного средства; нагрузки на группу осей транспортного средства; массы транспортного средства; габаритных размеров транспортного средства, межосевых расстояний транспортного средства; определение количество скатов, осей и колес на оси транспортного средства; автоматических измерений скорости и направления воздушного потока, температуры воздуха, относительной влажности воздуха, атмосферного давления, количества атмосферных осадков.
Система, включающая в себя ПО LOBACHEVSKY (LOBACHEVSKY-MS), выполняет следующие основные функции:
- Определение параметров движения ТС, автоматической фотовидеофиксацией и идентификацией зафиксированных событий;
- Автоматическое определение весогабаритных параметров ТС и автоматическое измерение метеорологических параметров;
- Анализ видеопотока с целью выявления ситуаций, когда скорость ТС на УДС превышает установленный порог, снабжение видеоданных отметками;
- Данных времени и места расположения в том случае, когда можно однозначно присвоить выявленное значение превышения скорости определенному ТС, видимому в поле зрения видеокамеры;
- Анализ характеристик транспортного потока, его состав, скорость движения по полосам, интенсивность;
- Взаимодействие со светофорным контроллером для целей локального адаптивного управления;
- Защита данных от несанкционированного доступа. Разграниченный уровень доступа к управлению ИС и ее функциям;
- Фиксация в автоматическом режиме всех ТС, следующих через зону контроля Системы во встречном и попутном направлениях;
- Фиксация нарушений ПДД (идентификация зафиксированных событий) в автоматическом круглосуточном режиме;
- Видеонаблюдение за дорожной обстановкой;
- Фиксация в автоматическом режиме знака и информационной таблички «Опасный груз»;
- Система осуществляет фиксацию в автоматическом круглосуточном режиме нарушений ПДД.
Описание средств измерений системы Лобачевский
Системы Лобачевский имеют модульную архитектуру и включают в себя измерительный модуль (далее — ИМ) и могут включать модуль вычислительного сервера (далее — ВС), модуль измерения весогабаритных параметров ТС (далее – МВ), модуль измерения метеорологических параметров (далее — ММ).
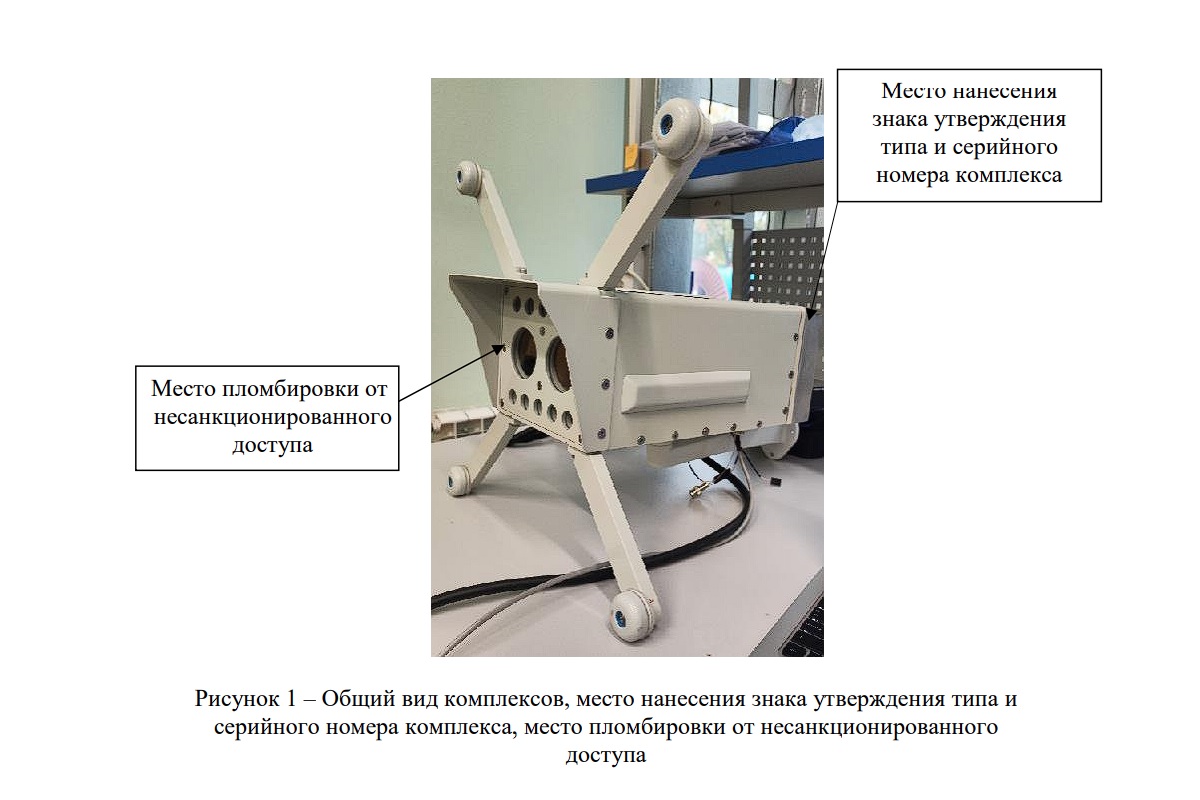
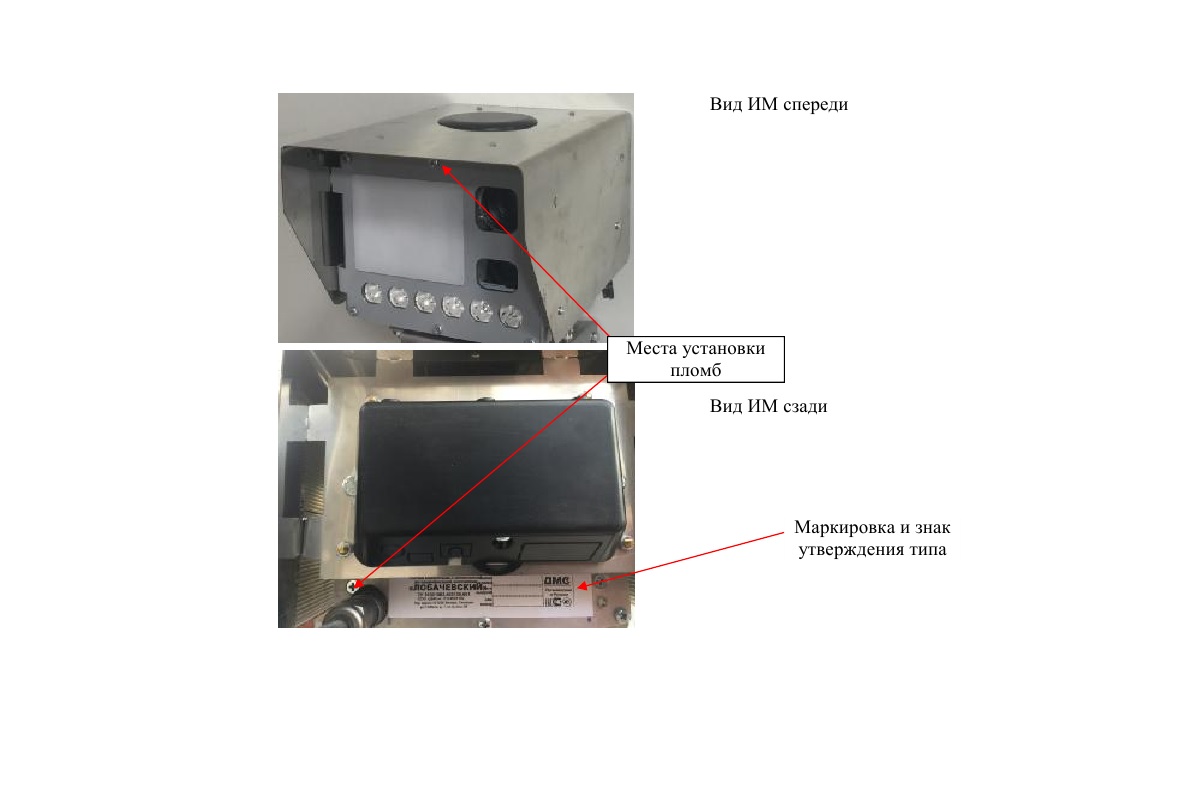
ИМ представляет из себя моноблок, выполнен в пыле-влагозащищенном корпусе, содержит в себе: радарный блок и/или видео блок, навигационный приемник, блокинфракрасной подсветки, блок питания, и может включать в себя модуль ВС. ИМ обеспечивает измерение скорости движения ТС радиолокационным методом, по видеокадрам в зоне контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС, определения текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определения координат местоположения Систем в плане.
Принцип действия измерительного модуля системы Лобачевский:
- при измерении скорости движения ТС по видеокадрам в зоне контроля основан на измерении расстояния, пройденного ТС в зоне контроля за измеренный интервал времени;
- при измерении скорости движения ТС радиолокационным методом в зоне контроля, основан на измерении разности частоты высокочастотных сигналов при отражении от движущегося объекта, находящегося в зоне контроля (эффект Доплера);
- при измерении скорости движения ТС на контролируемом участке дороги, основан на измерении интервала времени, за который ТС прошло расстояние между модулями Системы;
- при измерении расстояния до ТС основан на измерении относительных фазовых сдвигов сигналов, отраженных от контролируемого ТС;
- при измерении значений текущего времени и координат основан на приеме и обработке сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS с помощью приемника, входящего в состав Систем, автоматической синхронизации шкалы времени Систем с национальной шкалой координированного времени UTC(SU).
- ИМ изготавливаются в четырех модификациях. Модификации отличаются функционалом.«СМ-М» — обеспечивает измерение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
- «СМ-В» — обеспечивает измерение скорости движения ТС по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
- «СМ-Р» — обеспечивает измерение скорости движения ТС радиолокационным методом в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих
значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане; - «СМ-К» — обеспечивает измерение скорости движения ТС радиолокационным методом и/или по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в
плане.
ВС представляет собой внешний модуль, выполненный в пыле-влагозащищенном корпусе или может входит в состав ИМ. ВС включает в себя компьютер и программное обеспечение «Lobachevsky». ВС собирает и обрабатывает данные со всех модулей Системы.
При наличии в составе Системы нескольких модулей ВС назначается один главный сервер. В качестве МВ используются средства измерений утвержденного типа (регистрационные
номера 71822-18, 62427-15 в Федеральном информационном фонде), предназначенные для автоматических измерений нагрузки на ось движущегося ТС; нагрузки на группу осей ТС;
массы ТС; габаритных размеров ТС (длина, ширина, высота); скорости движения ТС; межосевых расстояний ТС; определения количества скатов, осей и колес на оси ТС. МВ должен обеспечивать передачу данных измеряемых параметров через Ethernet.
В качестве ММ используются средства измерений утвержденного типа (регистрационные номера 40331-14, 63313-16, 71764-18 в Федеральном информационном фонде), предназначенные для автоматических измерений метеорологических параметров: скорости и направления воздушных потоков, температуры воздуха, относительной влажности воздуха, атмосферного давления, количества атмосферных осадков, энергетической освещенности. ММ должен обеспечивать передачу данных измеряемых параметров через
Ethernet или интерфейс RS485 или радиомодем стандарта GSM.
Варианты использования системы Лобачевский:
- Стационарный вариант размещения — модули Системы размещаются на опорах, стойках и других элементах обустройства автомобильных дорог;
- Передвижной вариант размещения — модули Системы размещаются на штативах, треногах и т.п., на базе транспортных средств.
Системы имеющие в составе МВ и/или ММ и/или внешний ВС и/или ИМ в модификации СМ-В используются в стационарном варианте исполнения Системы.
При наличие в Системе нескольких ИМ установленных стационарно, в Системе может быть реализована функция измерения скорости движения ТС на контролируемом участке
дороги.